Fly-Pig: Quadrotor Flight Control Starting from PCB
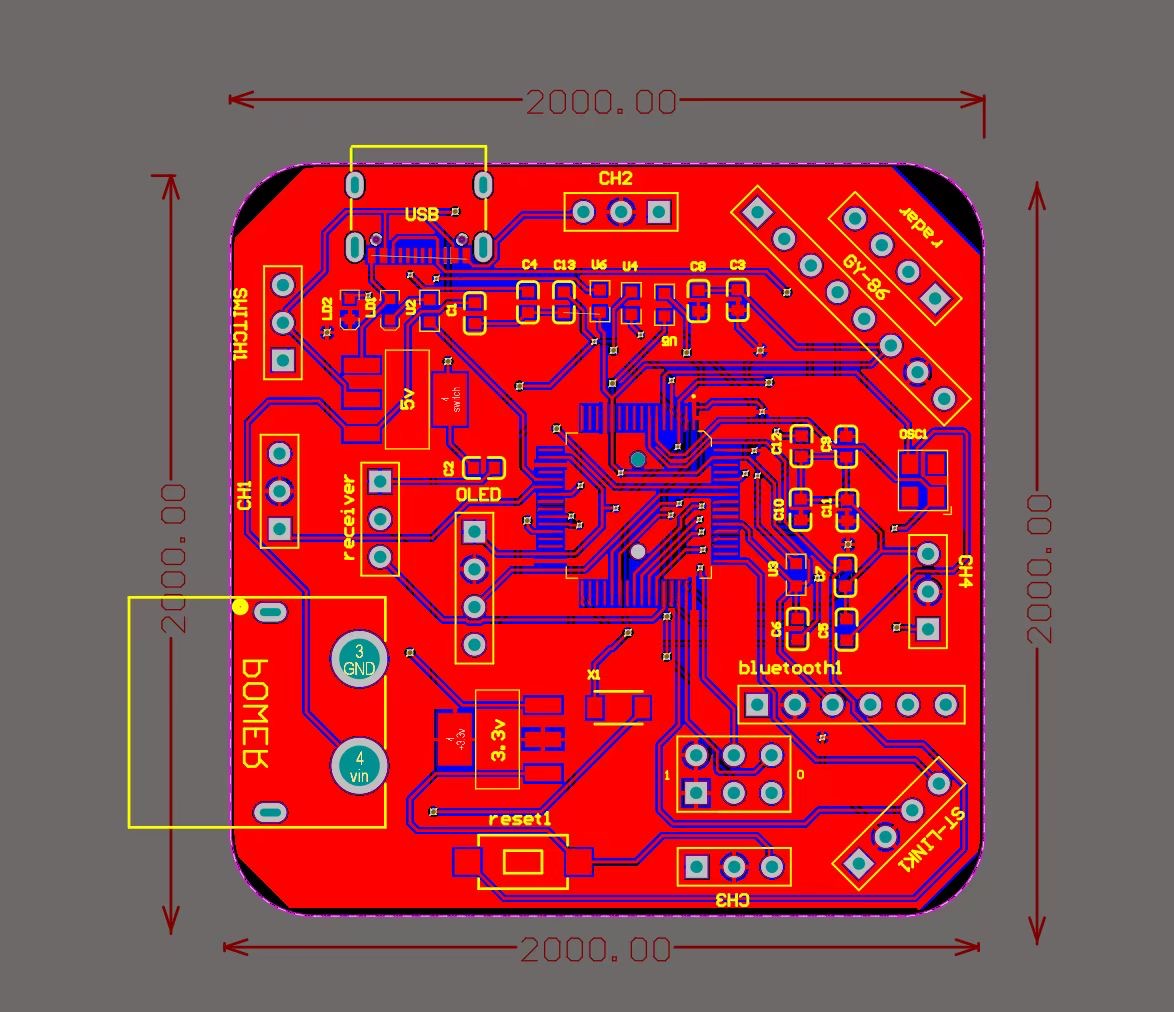
There are currently numerous types of flight controllers for drones, such as Kakute, among others. However, from the perspective of computer architecture, a simple flight control system encapsulates all the essential components of a computer system. Although small, it is comprehensive, incorporating sensor data acquisition, context switching, kernel porting, and operating system customization. For beginners just starting with embedded systems, it demonstrates a highly task-driven approach. This project begins with PCB design, integrates a unified board, and ultimately realizes the full flight of a quadrotor.